이미 보아 왔듯이, 설령 로봇이 한 시점에서 주변환경에 대한 정보와 하나의 목표를 가지고 있다고 하더라도 실제 일을 수행하는 문제는 단순하지가 않을 것이다. 그 목표를 달성하기 위해서는 좋은 planning과 action을 수행해야 하기 때문이다. 여기서 더 문제를 어렵게 만드는 요인은 주변환경이 시작한 시점과 동일하지 않을 가능성도 높고, 임무 수행중에 자기 자신의 pose가 계속 변한다는 사실이다. 이러한 변화에 적절하게 대응하는 방법은 외부 정보를 각종 sensor를 동원하여 얻어내고 이 정보를 처리하여 다음 action에 반영하는 것이다.
외부 정보(반드시 로봇 자체를 제외한 다른것들을 의미하지 않는다. 예를 들어, 로봇의 밧데리 상태도 일종의 외부 정보라고 볼수 있다)를 얻어내기 위한 sensor는 그 종류도 매우 다양하지만, 중요한 점은 될수록 일을 수행하는데 필요한 최소한의 간단한 센서를 사용하여 원하는 일을 수행하는 것이다. 공장에는 수많은 센서들이 현재의 상태를 계측하는데 사용되고 있지만, 여기서는 로봇분야에서 다루는 몇가지 센서에 대해 얘기하고자 한다. 물론 물리적 작동원리나 특성을 얘기하고자 하는 것은 아니다.
카메라
우리의 눈과 같이 시각정보(visual information)을 얻기 위해 사용한다. 입체감(3D)을 갖기 위해 두대의 카메라가 동원되는 stereo camera도 포함한다. 인간이나 동물은 이 시각정보를 매우 다양하게 활용한다. 그러나, 로봇에게는 이것이 그다지 쉬운일이 아닌것은 분명하다. 로봇을 조정하는 일은 로봇에 달린 카메라 정보를 모니터링하면서 인간은 로봇의 움직임에 대한 명령을 내린다. 시각정보로부터 우리가 목표를 달성하는데 필요한 정보를 추출하고 적절하게 판단하여 action을 부여하는 중추적 역할은 인간이 수행하는것이다. 그렇지만, 인공지능의 발달로 물체의 인식과 같은 분야에서는 비약적 발전이 있었으며, 로봇이 시각정보를 활용하여 자체적으로 판단할 수 있는 가능성이 매우 높아 졌다.
깊이 카메라 (Depth Camera)
깊이 카메라는 stereo camera가 특징이 없는 부분(예를 들어, 벽)에 대해서는 인식이 어렵다는 단점을 상쇄하고자 사용된다. 물제의 깊이 정보을 얻어낼 수 있으므로 로봇입장에서는 3차원적인 정보를 얻어낼 수 있다. 그러나 시각정보와는 달리 물체의 형상과 깊이에 관한 정보만 얻을 수 있다. Microsoft Kinect sensor가 대표적으로 알려져 있으며, 적외선을 사용하여 반향되는 시간을 이용하고 특별한 알고리즘을 사용하여 3D structure를 예측하게 된다.
레이저 스캐너 (Laser Scanner)
깊이 카메라가 낮은 가격에도 불구하고 로봇의 성능을 높이는데 기여를 하였지만 높은 정확도와 먼거리까지의 정보가 요구되는 상황에서는 아무래도 레이저 센서를 사용해야 한다. 자율주행차와 같이 주변환경변화가 많고 빨리 달리는 자동차에서는 레이저 스캐너는 회전하면서 얻은 정보를 이용해서 3차원 정보를 얻어내는데, 주변 물체의 속도를 판별하기 이해서는 여러대의 레이저 스캐너를 사용해야 한다.
Shaft Encoder
로봇의 움직임 정보(pose)를 얻어 내는 일의 중요성을 두말할 필요가 없다. 모터나 휠이 어느정도 회전하였는지에 대한 센서를 의미한다. Shaft가 정확히 몇번 돌았는지를 측정하는 일은 중요하지만, 이것이 차량의 pose를 정확히 대변한다고 할 수 없는것이 문제이다. 타이어휠의 압력이나 직경이 미세하게 다르거나, 축의 정렬상태나, 차의 스키딩등 셀수 없이 많은 에러의 요인들이 존재한다. 그러므로 자동차의 경우 다른 센서의 도움을 받을 수 밖에 없다. 그러나, 이러한 변화 요인이 많지 않은 부분 (예를 들어 샐내의 로봇에 연결된 관절의 회전)에서는 이 센서의 중요성이 여전히 높다.
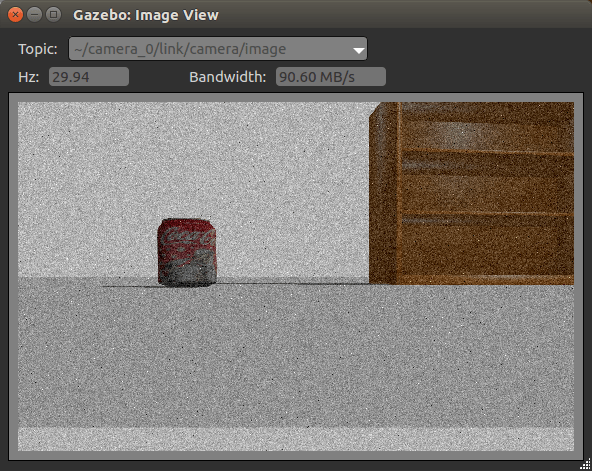
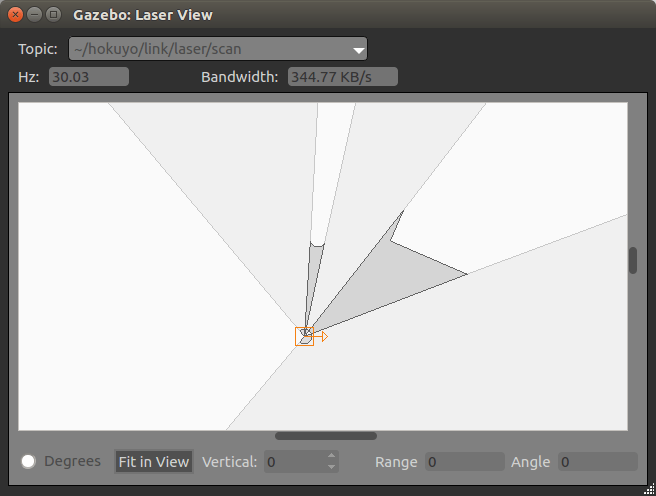
센서들의 활용 예
센서에 대해 간단히 소개만 하고서는 실제 활용에 대한 직감을 가지기 어렵다. 카메라의 경우에는 컴퓨터에 장착된 웹켐이나 휴대폰의 카메라와 별 다르지 않다. 레이저 스캐너도 사실 레이저를 통해 주변의 물체와의 거리를 측정한다. 센서들이 실제로 어떻게 구체화되는지에 관한 예를 보여주는 것이 있어 여기서 제시하였다. 앞서 확률론적 해석에서 밝혔듯이 두 센서 모두 노이즈라는 변수가 포함되어 있을 경우도 함께 제시하였다. 노이즈가 없는 경우와 있는 경우의 비교를 통해 다양한 환경에서 센서정보의 불확실성이 내재되어 있는 경우 우리는 그 정보를 어떻게든 처리해야 하므로 확률론적 해석의 필요성이 대두된다. 아래 3개의 캡쳐사진은 카메라의 경우이고, 다음 3개의 캡쳐사진은 laser의 경우이며, 마지막 사진은 주행 로봇이 두 센서를 장착하고 정보를 얻어내는 과정을 보인것이다.